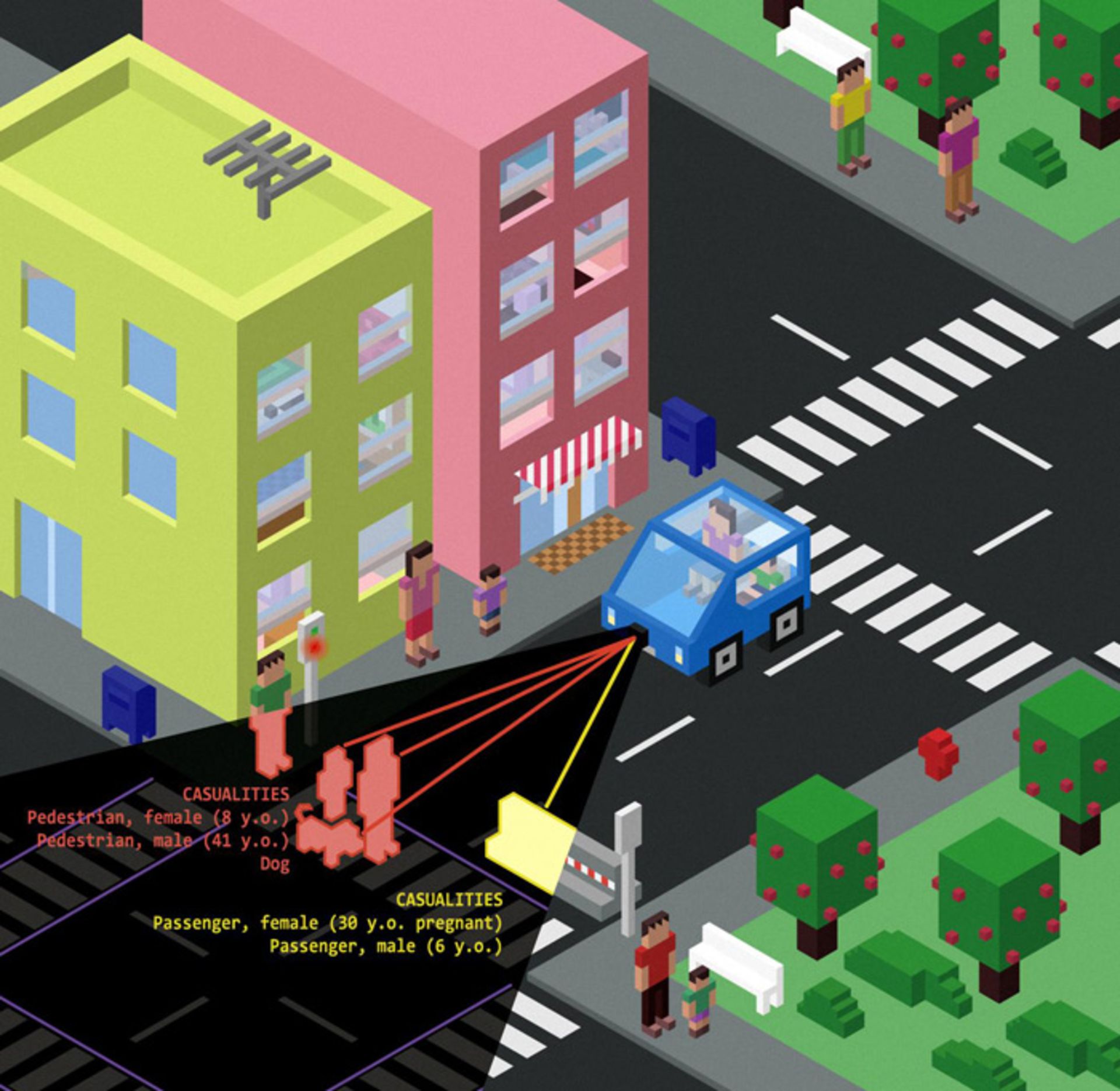
آیا خودروهای خودران برای قانون شکنی نیز برنامه نویسی می شوند

چنانچه خودروهای خودران بخواهند به تعداد زیادی به بازار عرضه شوند، به ناچار باید مسئله ایمنی در آنها باید افزایش یابد. بینهایت سناریوهای رفتاری مطرح شده است، مانند سیستم اجتناب از برخودرد با عابرپیاده که در واقع خودرو از مسیر منحرف میشود تا با عابر برخوردی نداشته باشد؛ اما این انحراف ممکن است سبب فوت مسافرین و راننده شود. به طور کلی همه این پرسشها در مورد اهمیت مرگ یا زندگی نیست. محققان دانشگاه استنفورد به دنبال یافتن چگونگی رفتار خودرو بدون سرنشین برای قانون شکنی در مواقع اضطراری و مورد نیاز هستند. بررسی ایمنی خودرو خودران توسط MIT تصویر مردم از این یکنولوژی را تیره و تار کرد، بطوری که به نظر میرسد مردم با طراحی خودروهای خودران برای به حداقل رساندن تلفات موافق هستند. اما این موضوع بدین معنی نیست که باید خودرویی خرند که شاید جانشان به خطر بیافتد. خوشبختانه، این سناریوها زمانی مهم و ضروری برای برنامهریزی است که باید تصادفات را کاهش دهد.
پروژه استنفورد مسائل بسیار کوچک رفتاری اما بسیار بااهمیت را مورد بررسی قرار میدهد. به طور مثال زمانی که خودرو بدون سرنشین با مانعی مواجه میشود که نصف خط جاده را گرفته و در وسط جاده خط ممتد قرار دارد، حال خودرو باید چه کند؟ مشخصا راننده واقعی در مورد شکستن قانون دو دل نخواهد شد و با فرض اینکه ترافیکی پیش نیاید، به راحتی از خط عبور کرده و مانع را رد میکند. اما آیا درست است که برای خودرو خودران برنامهای برای شکستن قانون در نظر گرفته شود؟ اگر چنین است، تحت چه شرایطی و تا چه حد؟
سارا تورنتون (Sarah Thornton) دانشجوی دکترای دانشگاه استنفورد در این زمینه توضیح میدهد: «ما میتوانیم در مواجهه با یک قید سختگیر و بزرگ خودرو را برای اجتناب از برخورد به صورت کامل متوقف کنیم.» این محقق معتقد است که در برنامهنویسی خودرو خودران، پیروی از قانون باید در نگاه اول به عنوان گزینهی معقولی مطرح شود. رانندگان واقعی معمولا برای ایمنی خودرو و مسافران این تخلف کوچک را انجام میدهند. این در حالی است که توقف کامل در وسط جاده برای یک تکه مقوای شاید گزینه ایمنی مناسبی نباشد! البته به جای این، بهتر است خودرو خودران به صورت غیر متعادل سمت قانونمندی بماند. خودرو میتواند انتخاب کند که از خط وسط جاده عبود کند، ولی عبور با کمترین فاصله از مانع که سبب میشود قانون شکنی کمینه شود اما همانند گفته تورنتون ،این حالت برای سرنشینان نشسته بر روی صندلی خودرو بسیار ناگوار خواهد بود!
راه دیگر این است که اگر ممکن است، خودرو به طور کامل به سمت خط مخالف حرکت کند. در این حالت خودرو دارای مانور نرمی خواهد بود و سرنشینان کمتر آزرده خواهند شد. همه این طرحها نیازمند بررسی هر چه بیشتر هستند. سلینا پن (Selina Pan) دانشجوی پسا دکترای استنفورد نیز در این خصوص میگوید: «خودروها به سمتی پیش میروند که در آن لحظه چه تصمیمی اتخاذ کنند. همچنین ما نیاز داریم به هر طریقی که ممکن است برخی رفتارهای اجتماعی و اخلاقی را برای خودرو ترجمه کنیم تا در نهایت بتوانیم خودرو را به صورت کامل کنترل نماییم.»
در این مقاله بررسی رفتارهای مختلف خودرو خودران در برابر انتخاب ایمنی، راحتی سرنشینان و قانون شکنی بررسی شد. همانطور که مشخص است یکی از دلایل بزرگ برای عدم موفقیت در تولید یک خودرو خودران کامل، رفتارهای آن در مواجه با شرایط مختلف محیطی است. حل این مسئله در دانشگاههای مختلف دنیا در حال بررسی است و محققان زیادی در تلاش برای تولید الگوریتمی جهت هوشمندسازی خودرو خودران هستند تا خودرو بتواند در مواجهه با شرایط نامعین و نامشخص جاده و تقابل آن با راننده، رفتار مناسبی از خود به نمایش بگذارد.
نظرات