ساخت ربات بیوهیبریدی که با ماهیچه و اعصاب حرکت میکند
پژوهشگران دستگاههای رباتیک نرمی ساختهاند که با تحریک نوری و بهکمک بافت عصبیعضلانی حرکت میکنند. این پیشرفت مهندسی مکانیک را قدمی به توسعهی بیورباتهای خودمختار نزدیکتر کرد. در سال ۲۰۱۴، پژوهشگرانی با هدایت طاهر سیف، استاد مهندسی مکانیک و راشید بشیر، استاد مهندسی زیستی دانشگاه ایلینوی، نخستین بیوربات بیوهیبریدی خودران شناگر و راهرونده را ساختند که با سلولهای تپندهی قلب مشتقشده از موش انرژی میگرفت. سیف میگوید:
نتیجهی اولین مطالعه ربات شناگر ما با موفقیت نشان داد این رباتها که از سلولهای اسپرم الگوبرداری شده بودند، واقعا میتوانند شنا کنند. در این نسل از رباتهای یک دُم، از بافت قلبی که بهخودیخود میتپید، استفاده شده بود؛ اما آنها نمیتوانستند محیط را احساس کنند یا تصمیمی بگیرند.
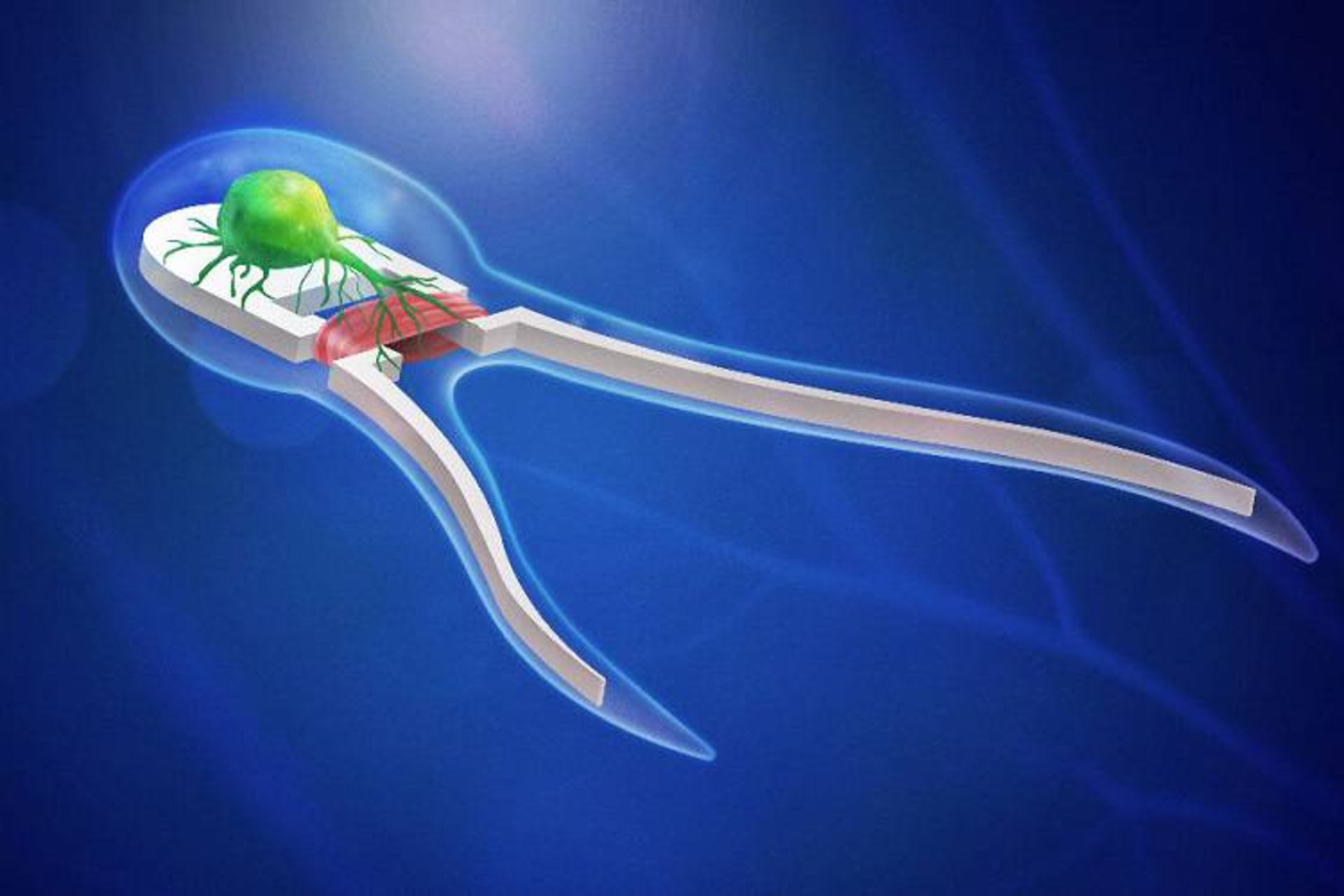
پژوهشگران در مطالعهی جدیدی که در مجلهی PNAS منتشر شده است، نسل جدیدی از رباتهای دودُم را تشریح کردهاند که از بافت عضلهی اسکلتی تحریکشده بهوسیلهی سلولهای عصبی نیرو میگیرد. نورونهای بهکاررفته در این رباتها ویژگیهای اپتوژنتیک دارند. این نورونها بهمحض قرارگرفتن درمعرض نور، برای بهکارانداختن ماهیچهها برانگیخته میشوند. سیف میگوید:
ما در محیط کشت سلولی نورونهای اپتوژنتیک را که از سلولهای بنیادی موش مشتق شده بود، در مجاورت بافت عضله قرار دادیم. نورونها بهسمت عضله پیش رفتند و اتصالات عصبیعضلانی تشکیل دادند و شناگر بهخودیخود تشکیل شد.
پژوهگشران پس از تأیید اینکه بافت عصبیعضلانی با اسکلت مصنوعی بیوربات سازگار است، بهمنظور بهینهکردن قابلیتهای شناگر تلاش کردند. سیف میگوید:
ما بهمنظور تعیین اینکه کدام ویژگیهای فیزیکی به سریعترین و کارآمدترین شنا منجر میشود، از مدلهای محاسباتی استفاده کردیم. برای مثال، برای مشخصکردن کارآمدترین حالت شناگر بیوهیبریدی، تعداد و طولهای مختلف دم را آزمایش کردیم. با توجه به اینکه فعالکنندههای بیولوژیکی بهاندازهی سایر تکنولوژیها پیشرفت نکردهاند، آنها نمیتوانند نیروهای زیادی تولید کنند.
ماتیا گازولا، دیگر پژوهشگر این مطالعه میگوید:
این امر موجب میشود کنترل حرکات آنها دشوار شود. باید داربستی که بیوربات در اطراف آن رشد و با آن ارتباط برقرار میکند، بهدقت طراحی کنیم از مزیتهای این فناوری استفادهی کامل ببریم و به عملکردهای حرکتی مدنظر دست پیدا کنیم. شبیهسازیهای کامپیوتری به ما کمک میکند طرحهای مختلف را بررسی و مناسبترین آنها را برای آزمایش در محیط واقعی انتخاب کنیم.
سیف میگوید:
توانایی فعالکردن عضلات بهکمک نورونها مسیر را برای تلفیق بیشتر واحدهای عصبی درون سیستمهای بیوهیبریدی بازمیکند. با توجه به درک ما از کنترل عصبی در حیوانات شاید بتوانیم با استفاده از ساختار سلسلهمراتبیِ شبکههای عصبی، طرح بیوهیبرید عصبیعضلانی را پیشرفتهتر کنیم.
پژوهشگران امیدوار هستند این پیشرفت به توسعهی سیستمهای زنده مهندسیشده چندسلولی با توانایی پاسخ هوشمندانه به نشانههای محیطی منجر شود. چنین سیستمهایی کاربردهای فراوانی در مهندسی زیستی و پزشکی و تکنولوژی مواد خودترمیمکننده خواهند داشت. اگرچه پژوهشگران خاطرنشان میکنند همچون موجودات زنده، هیچ دو ماشین بیوهیبریدی دقیقا بهشکل یکسانی توسعه پیدا نخواهند کرد. سیف میگوید:
درست مانند دوقلوها که واقعا یکسان نیستند، دو ماشین طراحیشده برای انجام یک عملکرد، یکسان نخواهند بود. شاید یکی از دیگری سریعتر حرکت کند یا آسیبها را بهشکل متفاوتی ترمیم کند: ویژگی منحصربهفرد از ماشینهای زنده.