رباتهای بوستون داینامیکس برای کشیدن کامیون چه نیرویی نیاز دارند؟

چندی پیش ویدئویی از رباتهای بوستون داینامیکس پخش شد که محصولات این شرکت رباتیکی را درحالکشیدن یک کامیون نشان میداد. شاید در نگاه اول، با دیدن ویدئو رباتها کمی ترس از دنیای زیرسلطهی آنها به ذهن شما متبادر شود و بیدلیل از قدرت فراوان آنها بترسید. چنین ویدئوهایی که قدرت رباتها را بیشازپیش نشان میدهند، هم جذاب و هم نگرانکننده بهنظر میرسند. جذابیت بهدلیل آن که گروهی ربات توانستهاند یک کامیون واقعی را بکشند و ترس نیز از شکلگرفتن ارتشی از رباتها به ذهن ما میآید.
شاید بتوان با درگیرشدن در محاسبات فیزیکی، کمی از ترس از رباتها کاست. بههرحال، شاید محاسبات فیزیکی برای علاقهمندان به این علم آنچنان درگیرکننده باشد که ذهنشان را از ترس دور کند. درواقع، ترکیبکردن کاری که به آن علاقه دارند، یعنی محاسبات فیزیکی، با مسئلهای نگرانکننده همچون ارتش رباتها، تاحدودی آرامشبخش خواهد بود.
سؤالات اول عبارتاند از: کشیدن چنین کامیونی چقدر دشوار است؟ تنها یک ربات توانایی کشیدن دارد یا خرگوشی کوچک نیز میتواند کامیون را جابهجا کند؟ ابتدا باید بدانید علم فیزیک بیش از همهچیز با اصطکاک سروکار دارد. اگر بخواهیم چنین کامیون بزرگی را جابهجا کنیم، به اصطکاک زیاد و کم بهصورت همزمان نیاز خواهیم داشت.
اصطکاک چیست؟ در مسئلهای با فرضیات کشیدن کامیون، درواقع دو نوع اصطکاک داریم. اصطکاکی ایستا بین پاهای رباتهای سگی و نیز اصطکاکی درمقابل چرخش چرخهای کامیون روی جاده وجود دارد. ابتدا مسئلهی اصطکاک ایستا را حل میکنیم.
وقتی دو سطح در تماس با یکدیگر داشته باشیم، نیرویی عرضی و موازی با سطوح داریم. نیروی مذکور از ارتباط بین اتمهای دو سطح ایجاد میشود. هیچکسی نمیتواند ارتباط بین ۱۰۲۶ اتم یا بیشتر را مدلسازی کند؛ بههمین دلیل، مدلی سادهتر از نیرو فرض میشود. مدل سادهی نیروی اصطکاک با خصوصیات زیر تعریف میشود.
نیروی اصطکاک را میتوان با فرمولسازی ریاضی بهصورت زیر نشان داد:
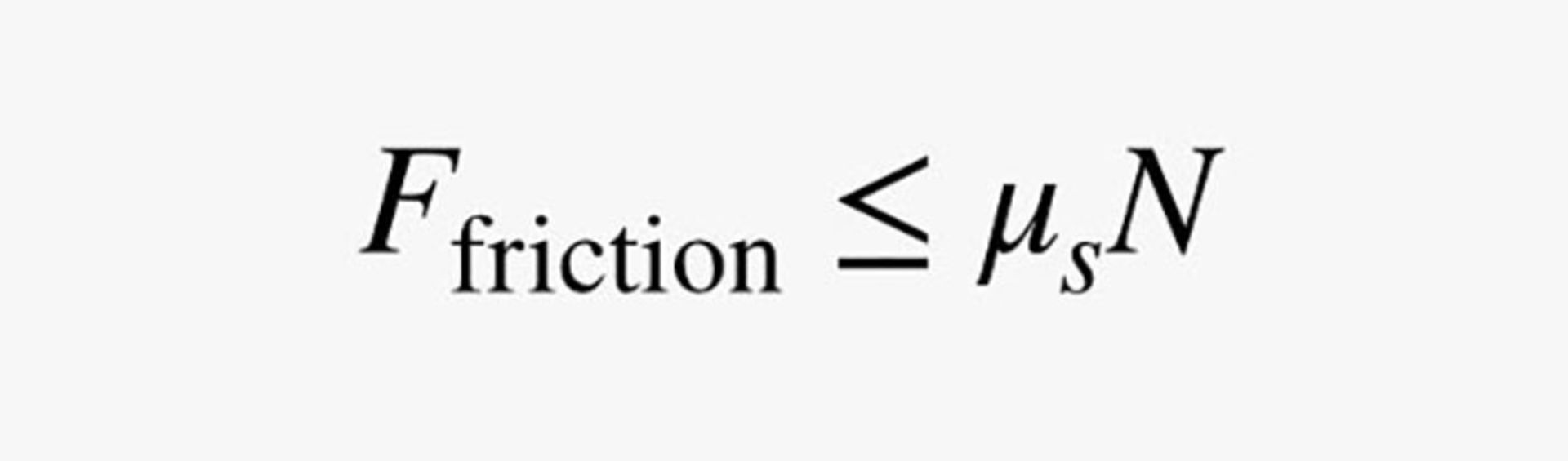
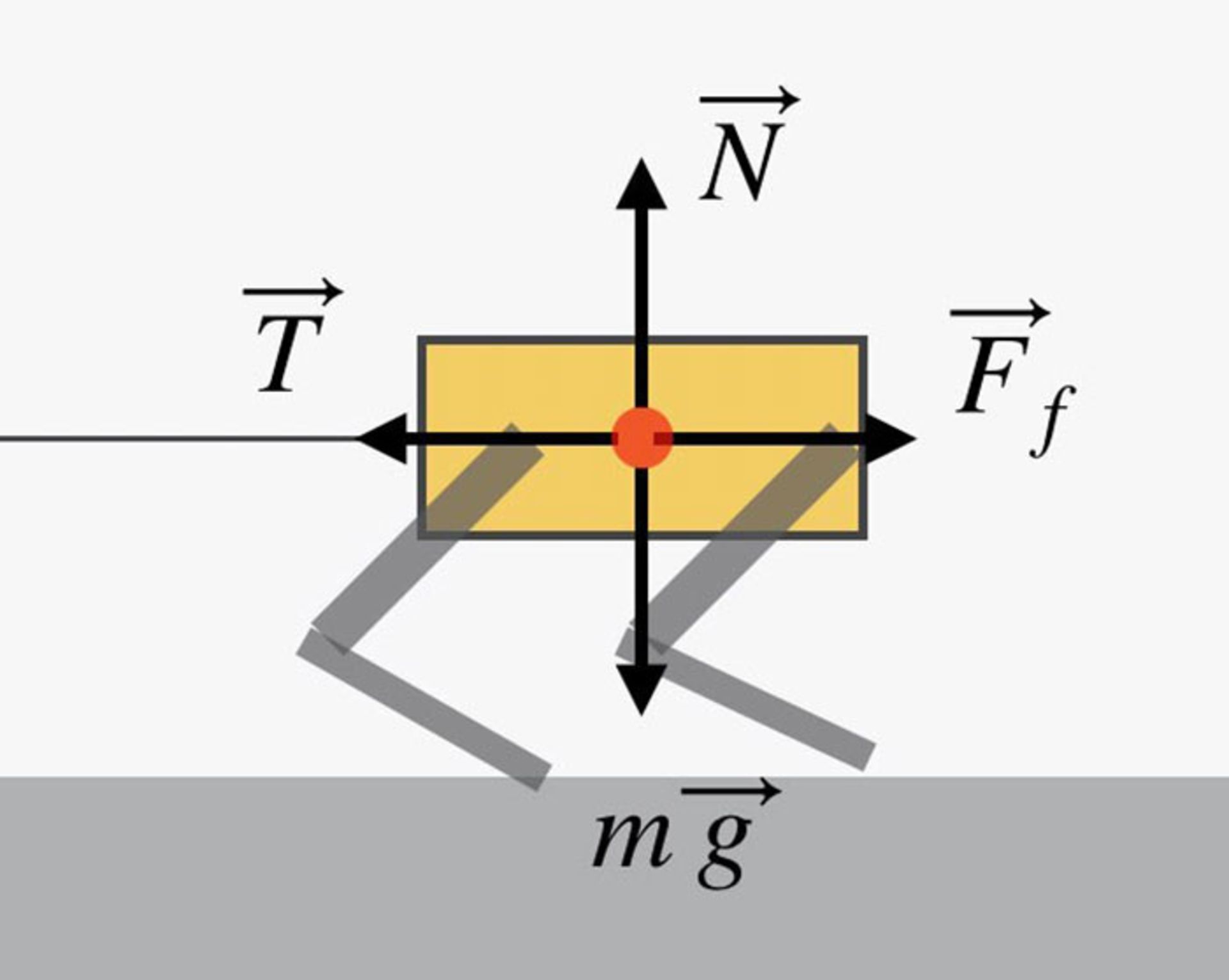
علامت کوچکتر یا مساوی در فرمول بالا، محاسبه و درک اصطکاک را کمی دشوار میکند. البته ازآنجاکه درحالبررسی موقعیتهای نهایی هستیم، میتوانیم رباتها را در حالت حداکثر اصطکاک یا نزدیک به آن تصور کنیم. در تصویر زیر، دیاگرامی از نیروی ربات اول خط را در حالتی مشاهده میکنید که طناب اتصال را میکشد.
با محاسبهی نیروهای بالا، به نیرویی میرسیم که برای حرکتدادن کامیون در سرعتی ثابت موردنیاز است. البته اگر در وضعیت ایدهآل باشیم، بهمحض راهافتادن کامیون دیگر به نیرو نیاز نخواهیم داشت و به سرعت ثابت میرسیم. تنها زمانی باید نیرو ادامه داشته باشد که بهدنبال شتاب یا غلبه بر نیروی دائمی دیگر همچون اصطکاک یا شیب مسیر (در این مسئله) باشیم.
ابتدا نیروی کششی حداکثر را برای یکی از رباتهای اسپاتمینی محاسبه میکنیم. طبق گفتهی شرکت سازنده، هریک از رباتها ۲۵ کیلوگرم جرم دارد. درنتیجه، وزن و نیروی نرمال برابر با ۲۴۵ نیوتن میشود. با درنظرگرفتن ضریب ۰.۷ برای تماس لاستیک و آسفالت، حداکثر نیرو اصطکاک ۱۷۱.۵ نیوتن برای هر ربات میشود. با استفاده از ۱۰ ربات به نیروی کشش ۱۷۱۵ نیوتن میرسید که بهنظر کافی میرسد.
چرا برای حرکتدادن کامیون به نیرو نیاز داریم؟ دلیل آن سنگینبودن کامیون نیست؛ بلکه نیروی اصطکاک در تماس آن با زمین هم وجود دارد. کامیون ما نمیلغزد؛ بلکه چرخهای آن روی آسفالت میگردند؛ درنتیجه، با اصطکاک غلتشی روبهرو هستیم. مفاهیم اولیهی این اصطکاک نیز مانند اصطکاک ایستایی هستند؛ اما دلیل ایجاد آن تغییر شکل لاستیک چرخها و همچنین اصطکاک موجود در بلبرینگ آنها است.
با آشنایی ساده با مفاهیم فیزیک میتوان نیروی موردنیاز رباتها را محاسبه کرد
محاسبهی ضریب اصطکاک برای حرکت کامیون دشواریهای زیادی دارد؛ چون به عوامل متعددی وابسته است. بههرحال ماشینحسابهای آنلاین زیادی به محاسبهی ضریب کمک میکنند. ضریب اصطکاک لاستیک روی آسفالت در منابع متعددی ۰.۰۲ بیان میشود که درمقایسهبا ضریب اصطکاک ایستایی بخش قبل بسیار کمتر است.
میتوان همان دیاگرام نیروهای ربات را برای چرخ کامیون نیز ترسیم کرد و تنها باید پاهای ربات را با چرخ جایگزین کنیم و کمی نیز جهت نیروها را تغییر دهیم. در فرضیات کامیون، نیروی اصطکاک بهسمت چپ و نیروی کشش بهسمت راست خواهد بود. با نگاهی دقیقتر به ویدئو، وزن عملکردی (GVW) کامیون را مشاهده میکنیم که با عدد ۲۶,۰۰۰ پوند (تقریبا ۱۱,۷۹۳ کیلوگرم) روی آن درج شده است. با چنین جرم و ضریب اصطکاکی، به نیروی کشش ۲,۳۱۱ نیوتن نیاز داریم. عدد بهدستآمده با اصطکاک محاسبهشده در مسئلهی رباتها تفاوت زیادی ندارد.
اگر کشیدن ربات را از روی سطحی شیبدار در نظر بگیریم، نیروهای لازم افزایش پیدا میکنند. البته، بالارفتن از سطح شیبدار اصطکاک کمتری دارد. برای درک این موضوع دیاگرام زیر را مشاهده کنید:
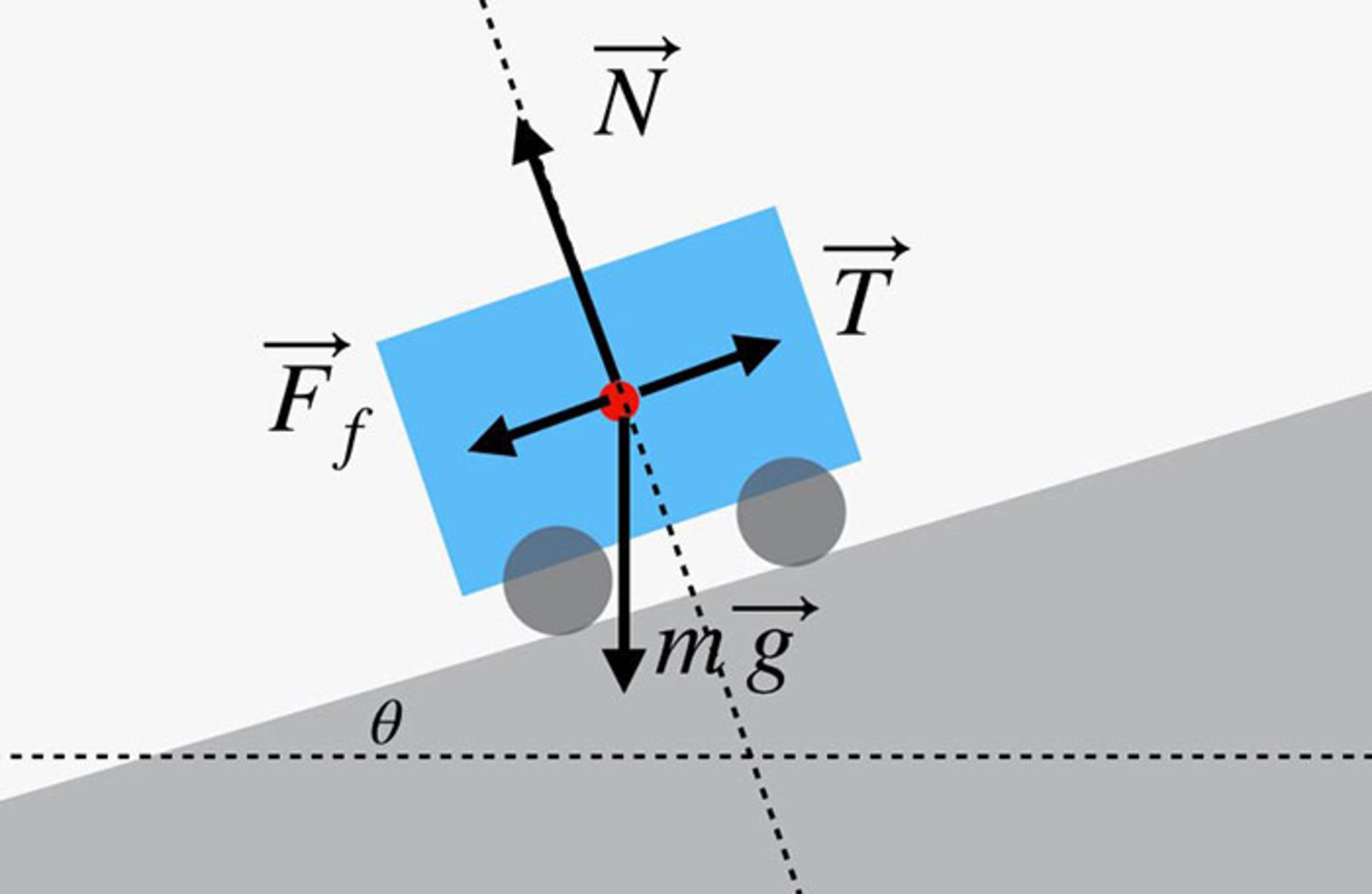
در مسئلهی جدید، نیروی وزن هنوز بهسمت پایین خواهد بود؛ اما سایر نیروها بهنوعی میچرخند تا با زاویهی شیب ایجادشده هماهنگ شوند. نیروی مهم در مسئلهی شیب، نیروی نرمال است. این نیرو بهصورت عمود بر سطح خواهد بود؛ اما نیروی وزن بهسمت پایین ترسیم میشود. درنتیجه، نیروی نرمال تنها شدتی برابر با عنصر عمودی نیروی وزن خواهد داشت. با افزایش زاویهی شیب، نیروی نرمال کاهش پیدا میکند و درنتیجه اصطکاک نیز کمتر میشود.
با افزایش شیب، اصطکاک کاهش مییابد
کاهش اصطکاک برای ۱۰ رباتی نیز اتفاق میافتد که کامیون را میکشند. آنها هم با کاهش نیروی اصطکاک موردنیاز برای کشیدن کامیون به بالای شیب روبهرو میشوند. آیا میتوان نتیجه گرفت بالارفتن از شیب بهاندازهی کشیدن کامیون روی سطح صاف آسان است؟ قطعا خیر. عامل دیگری هم باید در این مسئله در نظر گرفته شود. در بالارفتن از شیب، علاوهبر مقابله با نیروی اصطکاک باید با عنصری از نیروی وزن نیز مقابله کنیم.
در شیبهای پایین، عنصر افقی نیروی وزن که مانع از حرکت میشود، کم خواهد بود. البته در مسئلهی کامیون موجود، این مقدار به ۲,۰۱۷ نیوتن میرسد؛ نیرویی که تقریبا با شدت نیروی موردنیاز برای غلبه بر اصطکاک غلتشی کامیون برابر میشود.
با درنظرگرفتن فرضیات جدید، باید مسئله را بازتعریف کنیم. در ویدئو میبینیم که رباتها درحالکشیدن کامیون هستند؛ پس، باید فرضیات را به این صورت تغییر دهیم:
با مقادیر جدید، ۱۰ ربات میتوانند کامیون را با نیروی ۲,۲۰۴ نیوتن تا بالای شیب ببرند. البته در این مسئله، نیروی لازم برای بالابردن خود رباتها از شیب را در فرضیات حذف میکنیم. کامیون نیز به نیروی ۲۴۴۲ نیوتن نیاز دارد.