داستان کاوشگر؛ چگونه ناسا برای مأموریت مریخی بعدیاش خودرویی خودران ساخت؟

در بخش نخست داستان کاوشگر، سیر تبدیل ایدهی هلیکوپتر مریخی اینجنیوتی به واقعیت را شرح دادیم و دانستیم چگونه این هواگرد میتواند انقلابی در مسیر اکتشافات فضایی رقم بزند. بااینحال، مریخنورد پرسویرنس (Perseverance: بهمعنای استقامت)، عضو اصلی مأموریت پیشروی ناسا، نیز بهنوبهی خود رباتی شگفتانگیز با تواناییهایی منحصربهفرد است که در طول حضور روی سطح سیارهی سرخ وظایف مهمی برعهده خواهد داشت.
یکی از اهداف پرسویرنس، جمعآوری و نگهداری نمونههای زمینشناسی است تا در آینده بتوان آنها را برای مطالعهی نزدیک به زمین فرستاد. مریخنورد ناسا با گشتوگذار در دلتایی باستانی بهنام دهانهی جزرو، نمونههایی گردآوری خواهد کرد که ممکن است حاوی نخستین شواهد از حیات فرازمینی باشند. باوجوداین، پرسویرنس اول باید آنها را پیدا کند و بدینمنظور، به تعدادی کامپیوتر مناسب دستکم ازنظر استانداردهای مریخی نیاز دارد.
پرسیورنس بهنحو چشمگیر خودرانتر از چهار مریخنورد پیشین ناسا است و بهنحوی طراحی شده تا بهعقیدهی فیلیپ توو، مهندس سامانههای رباتیک در آزمایشگاه پیشرانش جت ناسا (JPL)، «خودرویی خودران روی مریخ» همانند نمونههای موجود در زمین باشد. مریخنورد بعدی ناسا با استفاده از آرایهای از حسگرها ناوبری خواهد کرد که دادهها را به الگوریتمهای بینایی ماشین منتقل میکنند؛ اما درحالیکه وسایل نقلیهی خودران زمینی مجهز به بهترین کامپیوترهای موجود در بازار هستند، سرعت کامپیوتر اصلی روی پرسویرنس تقریبا بهاندازهی کامپیوتر خانگی قدرتمند البته در سال ۱۹۹۷ است. ناسا کامپیوتر دومی نیز روی مریخنورد نصب کرده که همانند رانندهای رباتیک عمل میکند و مغز کهنهی پرسویرنس صرفا از همین طریق میتواند ازپس تمام فعالیتهای مربوط به رانندگی خودکار برآید.
داستان کاوشگر:
در مریخنوردهای پیشین، نرمافزار ناوبری ناگزیر بود منابع محاسباتی محدود را با تمام دیگر سامانهها بهاشتراک بگذارد؛ درنتیجه مریخنورد برای رفتن از نقطهای به نقطهی دیگر باید عکسی بگیرد تا محیط اطرافش را درک کند و قدری براند و سپس برای چند دقیقه توقف کند تا به حرکت بعدیاش پی ببرد. بااینحال، ازآنجا که پرسویرنس میتواند بخش عمدهی پردازشهای پیمایش بصریاش را به کامپیوتری اختصاصی محول کند، مجبور نخواهد بود برای اکتشاف مریخ این رویکرد توقف و رفتن را درپیش بگیرد. درعوض، وقتی پرسویرنس قرار است به نقطهای برود، کامپیوتر اصلیاش میتواند بفهمد چگونه مریخنورد را به همانجا ببرد و کامپیوتر بینایی ماشین نیز میتواند اطمینان یابد کاوشگر در مسیرش به هیچ سنگی برخورد نمیکند. فیلیپ توو میگوید: «هرچه بیشتر به دستیابی به توانایی رانندگی و تفکر بدون وقفه نزدیکتر میشویم.»
پرسیورنس بهنحو چشمگیر خودرانتر از چهار مریخنورد پیشین ناسا است
خودرانی برای مأموریت پرسویرنس حیاتی است. زمین و مریخ چنان از یکدیگر فاصله دارند که ممکن است حرکت یکطرفهی سیگنالی رادیویی با سرعت نور تا ۲۲ دقیقه طول بکشد. درواقع رفتوبرگشت یک فرمان بین زمین و مریخ تقریبا یک ساعت طول میکشد و درنتیجه، این تأخیر طولانی کنترل آنی مریخنورد را غیرممکن میکند. پرسویرنس برنامهای فشرده دارد؛ بدینصورت که باید هلیکوپتر اینجنیوتی را برای آزمایشهای پروازی روی سطح مریخ رها و سپس چندین نمونه سنگ جمعآوری و محلی برای نگهداری آنها پیدا کند. مأموریتی دیگر در آینده این نمونهها را به زمین خواهد برد تا دانشمندان با هدف یافتن نشانههای حیات آنها را مطالعه کنند. اگر مریخنورد بخواهد تمام این وظایف را در یک سال اختصاصیافته به مأموریت اولیهاش با موفقیت انجام دهد، باید بتواند بسیاری از تصمیمهای جهتیابی را با اتکا به خود اتخاذ کند.
وسایل نقلیهی خودران زمینی معمولا برای تعیین موقعیت یک جسم و فاصلهی احتمالی با آن از لیزر استفاده میکنند؛ اما این سامانههای لیدار حجیم و پرمصرف و مستعد خرابی مکانیکی هستند. درعوض، پرسویرنس برای پیبردن به موقعیت خود روی سیارهی سرخ از بینایی استریو و اودومتری بصری بهره میگیرد. بینایی استریو دو تصویر از دوربین چپ و دوربین راست را ترکیب میکند تا تصویری سهبُعدی از محیط اطراف مریخنورد بسازد؛ درحالیکه نرمافزار اودومتری بصری تصاویر را بهموقع بهطور مجزا تجزیهوتحلیل میکند تا میزان حرکت مریخنورد را تخمین بزند.
لری متیس، پژوهشگر ارشد و سرپرست گروه بینایی ماشین در آزمایشگاه پیشرانش جت ناسا، میگوید: «بابت پایداری مکانیکی لیدار برای مأموریتی فضایی نگران بودیم. از دههها پیش، یعنی وقتی سامانههای لیدار کمتر تکاملیافته بود، استفاده از بینایی استریو را برای درک سهبُعدی در JPL آغاز کردیم و عملکردی بسیار موفقی از آن شاهد بودیم.» متیس تاکنون به ساخت سامانههای ناوبری برای تمام سطحنوردهای ارسالشده به مریخ کمک کرده است. بهجز سوجرنر، نخستین مریخنورد ناسا، تمام کاوشگران متحرک این سازمان برای جابهجایی در مریخ ترکیبی از بینایی استریو و اودومتری بصری را بهکار گرفتهاند؛ اما آنچه پرسیورنس را متمایز میکند، بهرهگیری از سختافزاری اختصاصی و مجموعهای از الگوریتمهای جدید پیچیده برای بینایی ماشین است.
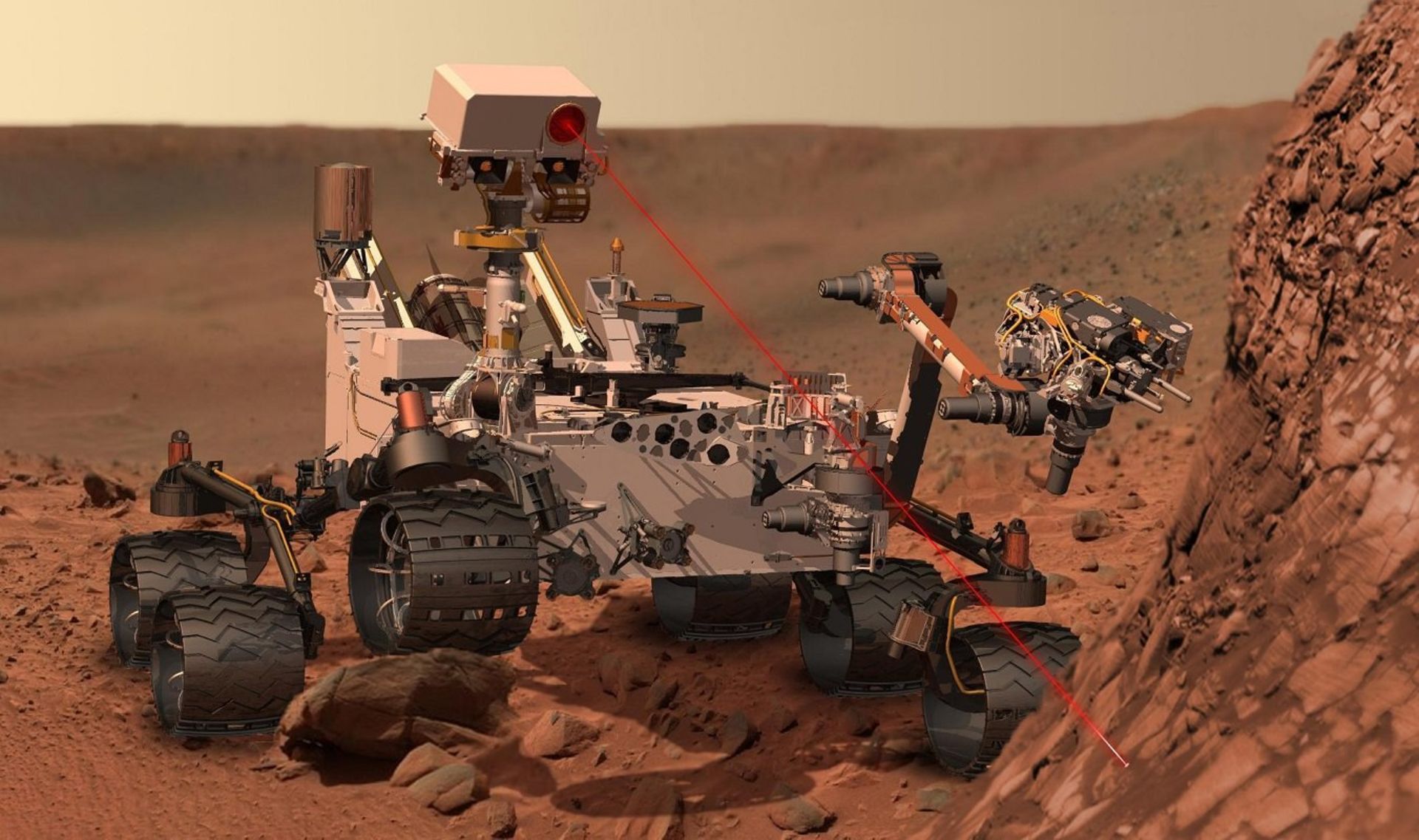
پرسویرنس همانند خودروهای خودران زمینی با استفاده از آرایهای از حسگرها ناوبری میکند که داده را از محیط به الگوریتمهای بینایی ماشین میرساند.
عینک دیجیتال جدید پرسویرنس به آن امکان میدهد چند برابر سریعتر از مریخنوردهای نسل پیشین محیط اطرافش را بهطور خودکار بپیماید. این توانایی بدینمعنی است که مریخنورد وقت بیشتری برای تمرکز بر اهداف علمی اصلیاش دارد. بااینحال، پیمودن همان مقدار مسافتی که تنبل، یکی از حیوانات کُند، میتواند در مدت یک ساعت پوشش دهد، برای پرسویرنس یک روز کامل طول خواهد کشید؛ اما مریخنورد بعدی ناسا درمقایسهبا نسلهای پیشین خودرویی مسابقهای است. توو میگوید: «بیشترین مسافتی که سطحنوردی مریخی تاکنون در یک روز پیموده، ۲۱۹ متر است. ما میتوانیم روزانه درحدود ۲۰۰ متر بپیماییم؛ درنتیجه بهطور متوسط پرسویرنس رکورد کنونی سطحنوردهای مریخی را میگیرد یا میشکند.»
مریخنورد بعدی ناسا بهلطف سختافزار اختصاصی و الگوریتمهای جدید بینایی ماشین، بسیار سریع خواهد بود
اینکه پرسویرنس آهسته فکر میکند، تقصیر او نیست؛ بلکه تابشها مقصر پردازش کُند مغز مریخنورد هستند. مریخ میدان مغناطیسی یا جوّ غلیظ ندارد تا سطح آن را از ذرات باردار در حال تابش از خورشید محافظت کنند. این ذرات کامپیوترها را خراب میکنند و میتوانند موجب روشن و خاموششدن ترانزیستورها شوند. انباشتهشدن تعداد کافی از این خطاها میتواند کامپیوتر را از کار بیندازد و موجب ازدسترفتن دادههای ارزشمند یا شکست کل مأموریت شود؛ درنتیجه، مهندسان در ناسا هرچه در توان دارند، انجام میدهند تا از ابتدا جلوی وقوع خرابیها را بگیرند.
برای ایمنسازی کامپیوتر دربرابر تابشها، شیوههای فراوانی وجود دارد. بهعنوان مثال، میتوان ترانزیستورهایی اضافی افزود که خاموش و روشن کردنشان دشوارتر باشد. مینال ساوانت، معمار سامانههای فضایی در شرکت فناوری زایلینکس و سازندهی تراشهی بینایی ماشین برای پرسیورنس، میگوید تراشهی آنها ازنظر طراحی دربرابر تابشها مقاوم است. براساس آزمایشهای احراز کیفیت شرکت، تراشه نباید سالانه بیش از دو خطای تغییر وضعیت بیت را تجربه کند. در جریان این خطا، ذرات باردار موجب میشوند بیتی از اطلاعات ذخیرهشده در حافظه از یک به صفر یا برعکس تغییر کند.
بهطور کلی، محافظت از پردازنده دربرابر تابش نیازمند قربانیکردن عملکرد آن است. این امر تا حدی ناشی از طراحی پردازنده و تا حدی مرتبط با این حقیقت است که آزمایش ایمنی قطعهای دربرابر تابش صرفا زمان زیادی میبرد. وقتی کیفیت قطعه احراز شود، عملکرد تازهترین پردازنده از مدل انتخابشده پیشی گرفته است. مهندسان ناسا نمیخواهند از فناوری قدیمی استفاده کنند؛ اما میخواهند از فناوریای بهره بگیرند که میدانند جواب میدهد. نوع تراشهی بهکاررفته در پرسویرنس در چندین مأموریت فضایی پیشین پرواز کرده و عملکردش در طول نزدیک به یک دهه اثبات شده است.
صنعت فضایی آمریکا بهطور سنتی و البته منطقی بسیار ریسکگریز است. ساوانت میگوید: «خطایی کوچک میتواند موجب شکست کل مأموریت شود؛ درنتیجه، آنها میخواهند بهجای آزمودن فناوری تازه از قطعهای استفاده کنند که پیشتر در فضا بوده است. اطمینانپذیری شرط ضروری است.»
کامپیوتر بینایی ماشین زایلینکس الگوریتمهای بینایی جدیدی را اجرا خواهد کرد که توو و متیس و همکارانشان در ناسا ساختهاند. پرسویرنس برخلاف خودروهای خودران زمینی، برای پردازش تصویر مجموعهای لوکس از کامپیوترهای قدرتمند را ندارد. انرژی و قدرت پردازش منابعی ارزشمند در سیارهی سرخ هستند؛ بدینمعنا که الگوریتمهای بهکاررفته در پرسویرنس برای ناوبری، باید بدون قربانیکردن دقت تاحدممکن کمحجم و کارآمد باشند.
متیس معتقد است: «حتی اگر سختافزار عالی باشد، الگوریتمها همیشه اشتباه میکنند. در بینایی کامپیوتری، دادههای پرتی وجود دارد که موجب میشود الگوریتم اشتباه کند؛ ازاینرو، باید این احتمال را بهشدت درنظر بگیریم.» دادههای پرت ممکن است شامل موقعیتی باشد که مریخنورد نمیتواند جسمی را ببیند یا آن را با چیزی دیگر اشتباه میگیرد. یکی از راهکارها برای این مشکل، انتقال داده از دیگر حسگرها به سامانهی ناوبری است تا مریخنورد برای جابهجایی صرفا به بینایی تکیه نکند. بهعنوان مثال، ژیروسکوپها و شتابسنجها در درک شیب و ناهمواری سطح به مریخنورد کمک میکنند.
راهکار دیگر قراردادن مریخنورد درمعرض سناریوهای هرچهبیشتر پیش از پرتاب است تا دراینصورت وقتی به مریخ میرسد، با اتفاقی غیرمنتظره مواجه نشود. در آزمایشگاه پیشرانش جت ناسا، زمین بزرگی پوشیده از تختهسنگها و خاک قرمز در فضای باز وجود دارد که چشماندازی مریخی را شبیهسازی میکند. این مکان حیاط مریخی نام دارد و در چند سال گذشته بهعنوان محیطی تمرینی برای الگوریتمهایی بهکاررفته است که پرسویرنس را هدایت خواهند کرد. توو و همکارانش بهطور منظم ماکتی از پرسویرنس را به حیاط مریخی برده و عمدا سناریوهایی طراحی کردهاند که بهباورشان مریخنورد را سردرگم خواهد کرد. بهعنوان مثال، اگر مریخنورد خود را به داخل بنبستی براند، میتواند عقبنشینی و مسیری تازه را امتحان کند؟
مسیری که پرسویرنس خواهد گشود، میتواند به یافتن شواهدی از حیات فرازمینی منتهی شود
توو میگوید: «هرچه سامانه پیچیدهتر باشد، انواع بیشتری از تصمیمها را میتوان گرفت. اطمینان از این موضوع بسیار چالشبرانگیز بوده است که تمام سناریوهای احتمالی را پوشش دادهاید که ممکن است مریخنورد با آنها مواجه شود. بااینحال با انجام آزمایشهای عملی فراوان نظیر این، جنبههای خاص رفتار الگوریتم را پیدا میکنیم.»
برای چیدن تختهسنگها در جعبهی شنی بزرگ، راههای بسیاری وجود دارد. اغلب آزمایشهای الگوریتمهای ناوبری پرسویرنس در شبیهسازیهای مجازی انجام شد؛ جایی که تیم مریخنورد هر سناریو امکانپذیری را روی نرمافزار ربات ریخت تا به نحوهی عملکرد آن در موقعیتهای مختلف پی ببرد. این کار همچنان عمدتا درهمآمیختن سنگهای مجازی اطراف بود؛ اما برای طراحی انواع چشماندازها و سناریوهایی احتمالی واقعا محدودیتی وجود نداشت. توو میگوید این آزمایش گستردهی الگوریتمهای بصری با دیگر دادههای گردآوریشدهی مریخنورد به پرسویرنس امکان خواهد داد تا درمقایسهبا سایر سطحنوردهای مریخی، در زمینهای ناهموار بسیار بیشتری ناوبری کند.
درپایان باید اشاره کنیم حتی بینقصترین شبیهسازیها هم به پای شرایط واقعی نمیرسند. مریخنورد پرخطرترین آزمونش را وقتی انجام خواهد داد که فوریهی سال آینده (بهمن یا اسفند ۱۳۹۹) روی سیارهی سرخ قدم بگذارد. اگر همهچیز بهخوبی پیش برود، مسیری که پرسویرنس خواهد گشود، میتواند به یافتن شواهدی از حیات فرازمینی منتهی شود.
ادامه دارد...