حل مساله مکعب روبیک در ۰.۳۸ ثانیه توسط یک ربات
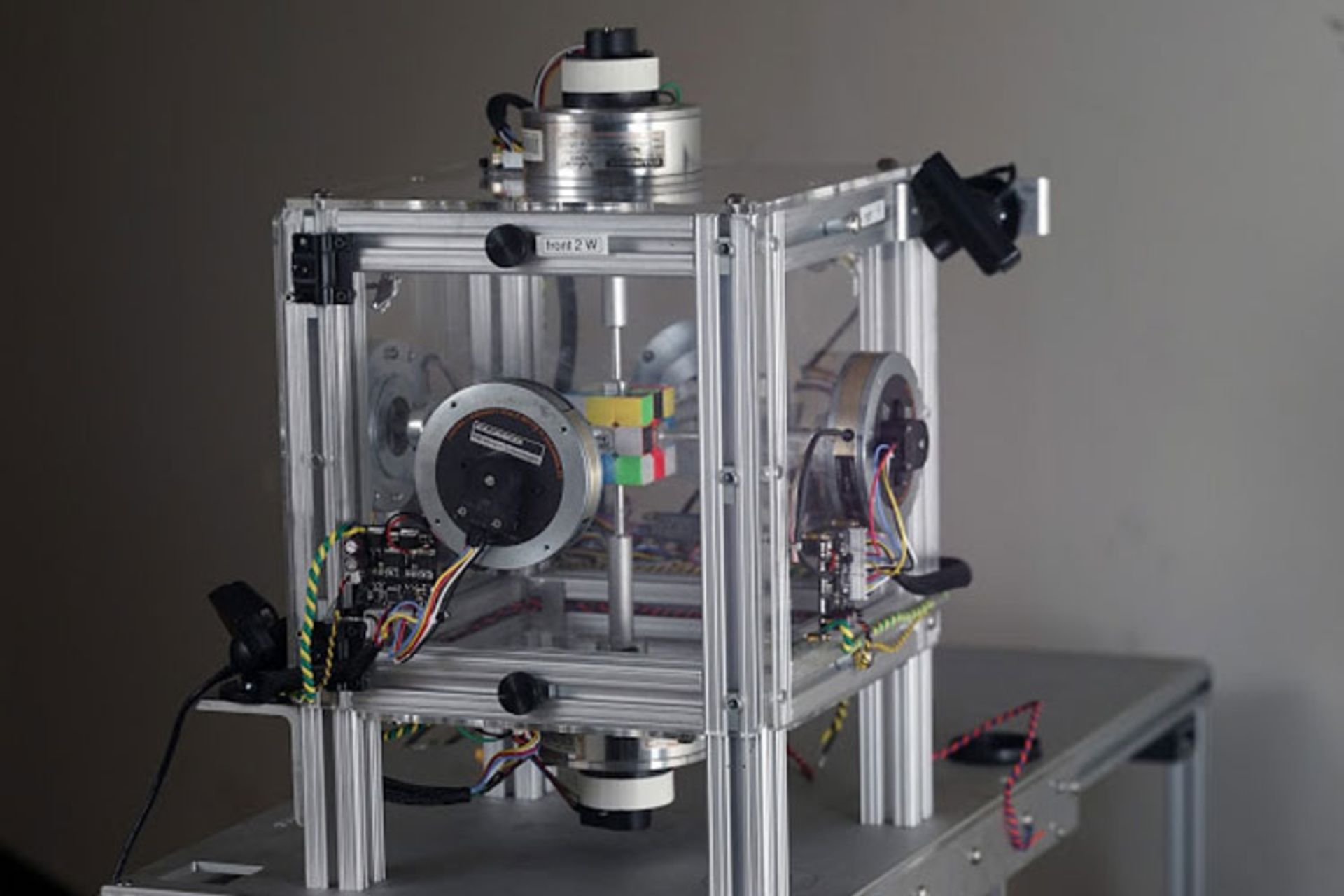
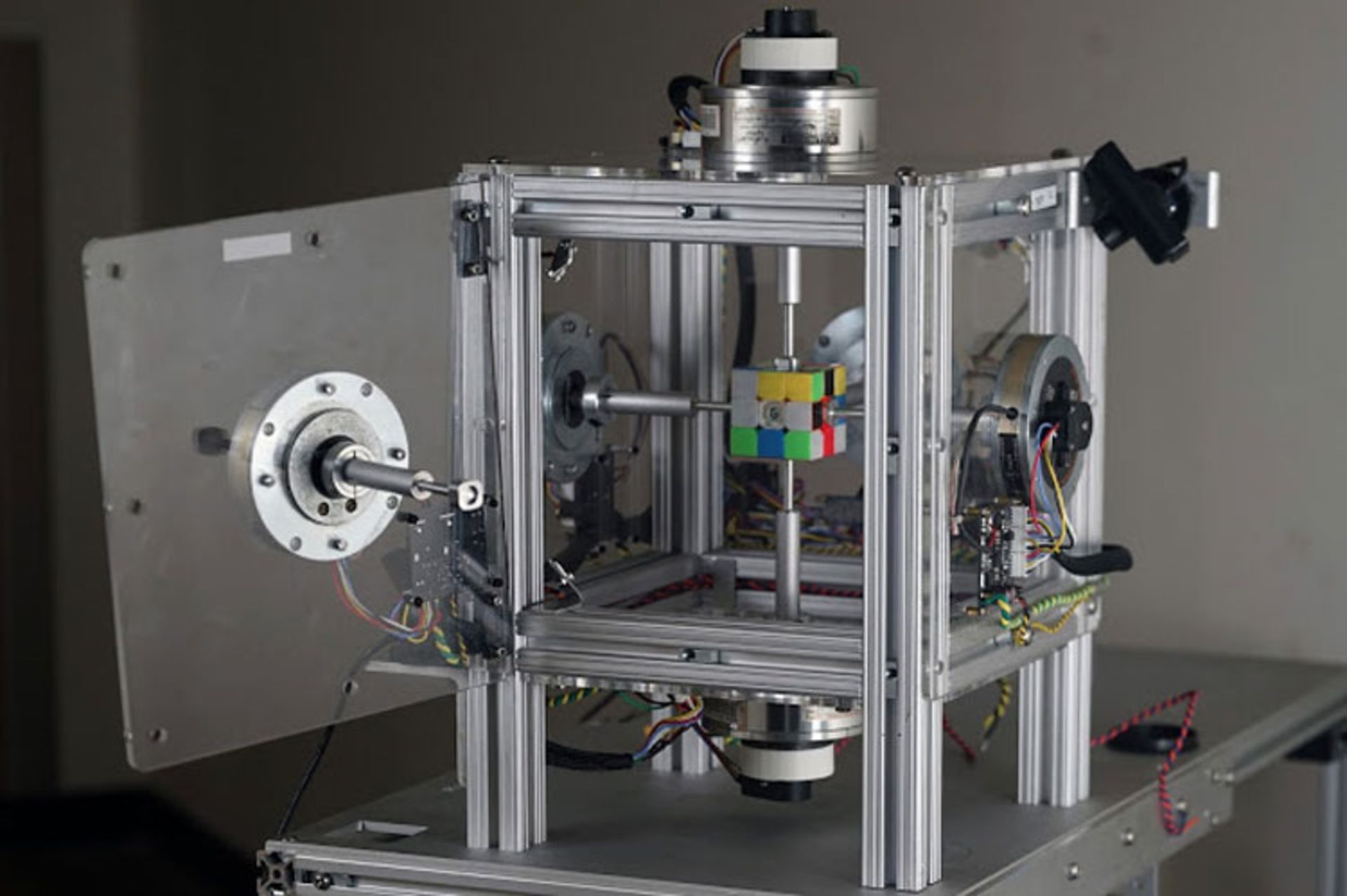
بن کتز و جِیرد کارلو دو متخصص سختافزار هستند که موفق شدهاند با طراحی و توسعهی رباتی جدید، زمان حل مکعب روبیک را با استفاده از ربات کاهش داده و رکورد جدیدی را به ثبت برسانند. ربات جدید توسعه یافته موفق شده تا در کمتر از ۰.۳۸ ثانیه مکعب روبیکی را حل کرده و آن را به شکل منظم با یک رنگ در هر یک از وجوه تبدیل کند. رکورد جدید در مقایسه با رکورد پیشین ۰.۶۳۷ ثانیهای ۴۰ درصد بهبود پیدا کرده است.
دی کارلو، یکی از متخصصان توسعه دهندهی این ربات در وبلاگ خود چنین اظهار نظر کرده است:
ما در تحقیقات خود متوجه شدیم که اغلب افرادی که اقدام به توسعهی رباتهایی برای حل مکعب روبیک کردهاند، از استپ موتور برای این منظور استفاده میکنند، حال آنکه ما فکر کردیم که میتوان با استفاده از موتورهای بهتر، زمان به دست آمده را بهتر کرد.
موتوری که کنترلر آن بهصورت دستی توسعه یافته، این امکان را ایجاد میکند تا بتوان یک دور کامل یک وجه مکعب را در کمتر از ۱۰ میلی ثانیه کامل کرد. با توجه به اینکه کامل کردن مکعب روبیک نیاز به ۱۹ تا ۲۳ حرکت دارد، از اینرو باید یک مکعب روبیک را در کمتر از ۰.۲۵ ثانیه حل کرد. البته سریعترین ربات هر وجه مکعب را به مدت ۱۵ میلی ثانیه انجام میدهد، از اینرو است که رکورد ثبت شده ۰.۳۸ ثانیه ثبت شده است.
کتز، دیگر توسعه دهندهی ان ربات در این خصوص چنین اظهار نظر کرده است:
مطمئنا موتور توسعه یافته میتواند سریعتر از این نیز حرکت کند، اما فرایند بهینهسازی و تیون کردن موتور برای سریع شدن بسیار وقتگیر بوده و عیبیابی آن نیازمند استفاده از دوربینهای سریع است. هر اشتباه در این فرایند منجر به شکسته شدن مکعب میشود. در حال حاضر ما انگیزهای برای بهبود رکورد و کار روی فرایند بهبود نداریم، هرچند احتمالا در آینده شاید بتوانیم با کار بیشتر روی فرایند مورد نظر، زمان حل مساله را تا ۱۰۰ میلی ثانیه بهبود دهیم.
توسعهدهندگان ربات مورد نظر اعلام کردهاند که برخلاف روش حل مکعب روبیک توسط انسانها که آزاد کردن لایهها باعث افزایش سرعت میشود، در روش حل با استفاده از ربات باید لایهها را بهصورت محکمی در کنار یکدیگر قرار داد تا سرعت افزایش یابد.
برای قسمت دیداری ربات مورد نظر، توسعهدهندگان از سه ماژول دوربین Eye مربوط به پلیاستیشن ۳ بهره بردهاند که هر کدام به قیمت ۷ دلار خریداری شدهاند. هر دوربین در یک زاویهی مخالف قرار گرفتهاند. به عبارتی هر دوربین به گونهای در یک زاویه قرار گرفتهاند که میتوانند سه وجه را پوشش دهند. البته با توجه به مشکل دوربین برای تشخیص رنگ نارنجی و قرمز از یکدیگر، وجه نارنجی به رنگ مشکی درآمده تا مشکلی از بابت تشخیص رنگ نارنجی و قرمز پیش نیاید.
فرایند کار بدین شکل است که ابتدا وضعیت هر وجه مکعب روبیک توسط دوربین شناسایی شده و سپس به تابع مربوطه برای ارائهی راهکار حل مساله سپرده میشود. تابع مورد نظر پس از پیدا کردن راهحل درست کردن مکعب، دستورات مورد نیاز را در اختیار ۶ موتور مورد استفاده برای هر یک از وجهها قرار میدهد و به این ترتیب موتورها شروع به کار کرده و به ترتیب مسالهی مکعب روبیک را حل میکنند. کل فرایند ارسال وضعیت هر وجه مکعب به تابع و ارائهی راهحل کمتر از ۴۵ میلی ثانیه طول میکشد.


نظرات